
三维激光扫描应用于机电预留预埋位置检测
三维激光扫描应用于机电预留预埋位置检测
此项目在地下室(设备层)结构施工阶段需在捆扎钢筋时预留预埋洞口或管道,以便后期设备的连接、输入和输出。预留预埋得准确性尤为重要,洞口及预埋件的位置尺寸将对后期机电安装产生很大影响。在土建施工完成后,往往也存在着多种错误,如洞口位置偏移,实际尺寸与图纸尺寸不一致等现象;可能是施工图本身存在的设计错误,也可能是施工过程造成的错误。若再采取开孔等措施,将对结构安全产生不利影响,此时需要提前对所有洞口及预埋件进行校核,根据误差值调整机电管道的位置、连接方式或走向。
三维激光扫描技术的发展和应用,不仅很好的解决了以上难点,三维激光扫描技术结合BIM模型,可轻松对现场的预留孔洞进行整体校核。
一、三维激光扫描技术
三维激光扫描技术又称实景复制技术;利用高速激光扫描测量的方法,可大面积、高分辨率、快速地获取物体表面各个点的(x.y.z)坐标、反射率、(R.G.B)颜色等数据信息,为快速复建出1:1真彩色三维点云模型提供的一种全新技术手段。
三维激光扫描技术是一种新型测绘技术,它的出现是测绘领域继GPS技术之后的一次技术革命,促进了传统测量方式向更加现代、更加便利的方向发展。三维激光扫描技术的主要优势在于其具有高密度、高分辨率、高精度数据以及使用简便等特点。利用三维激光扫描技术,可以轻松采集各种小型的、大型的、复杂的、标准或非标准的场景的高精度、高密度三维点云数据;进而快速重构出目标场景的真三维模型。


二、实施方案
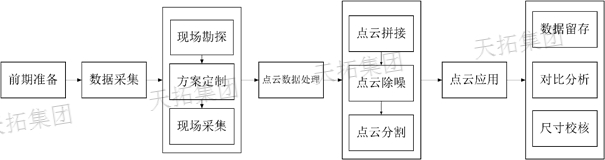
实施流程图
①前期准备阶段
根据现场踏勘情况制定详细的作业方案,包括设站数量和设站位置、参考标靶的摆放等工作,尽量做到保障测量精度的前提下,减少设站数,节约扫描时间,提高作业效率。
②数据采集阶段
按照既定的作业方案完成数据采集,在采集过程中如果发现不合理的地方,要及时增加或减少扫描测站,保证数据完整和轻量化。
③数据处理阶段
数据处理包括点云拼接、点云过滤、去除噪声、数据精简步骤,得到完整的、高质量的、可用的点云数据。
④点云应用阶段
点云数据是包含了物体三维坐标值、色彩信息的数据,可以根据需要对点云作进一步的应用,如原始资料存档、三维建模、尺寸校核、场景虚拟等。
三、应用成果
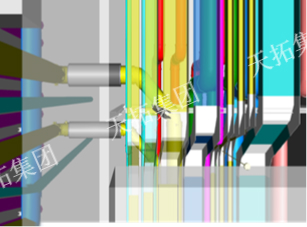
提取目标管道点云数据
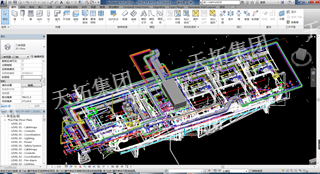
在revit软件中提取对应的管道BIM模型
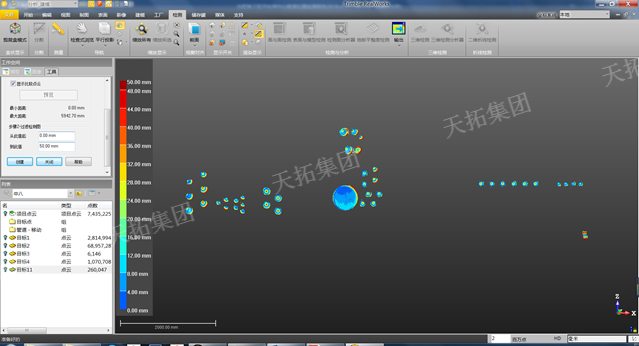
管道整体检测分析报告
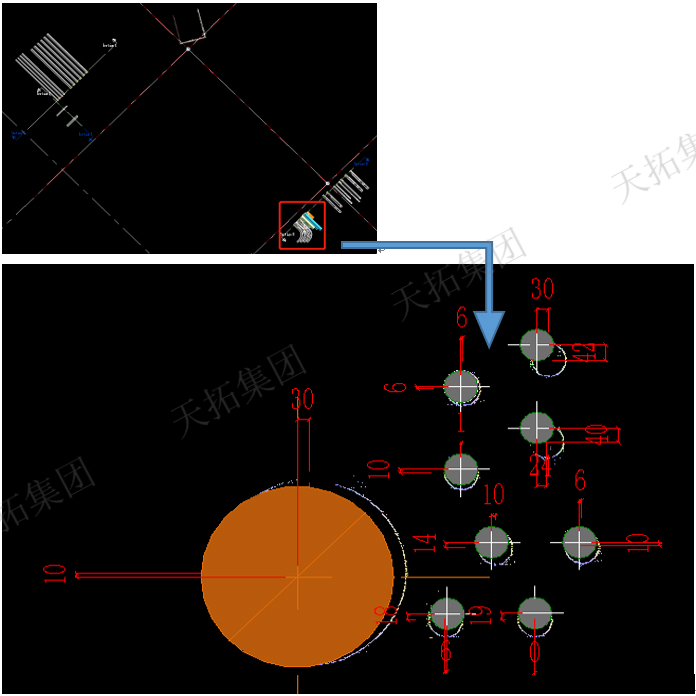
管道BIM模型和点云数据进行对比检测,并出具偏差色谱图。根据色谱图可判断偏出的偏移值的大小(可根据左边颜色对应的数值判断偏差的大小)。
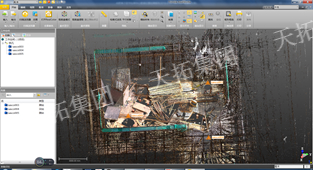
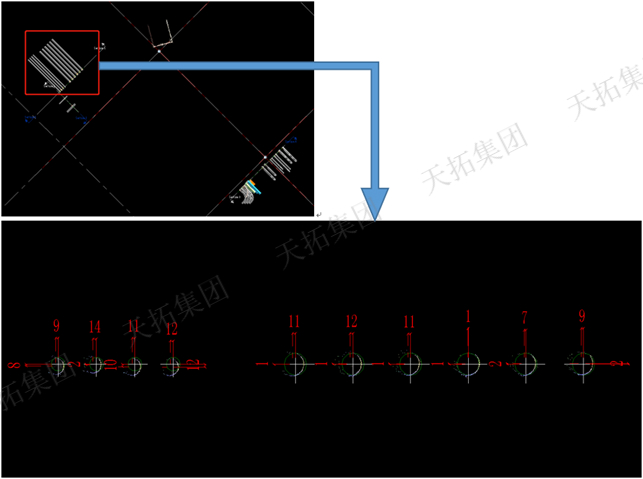
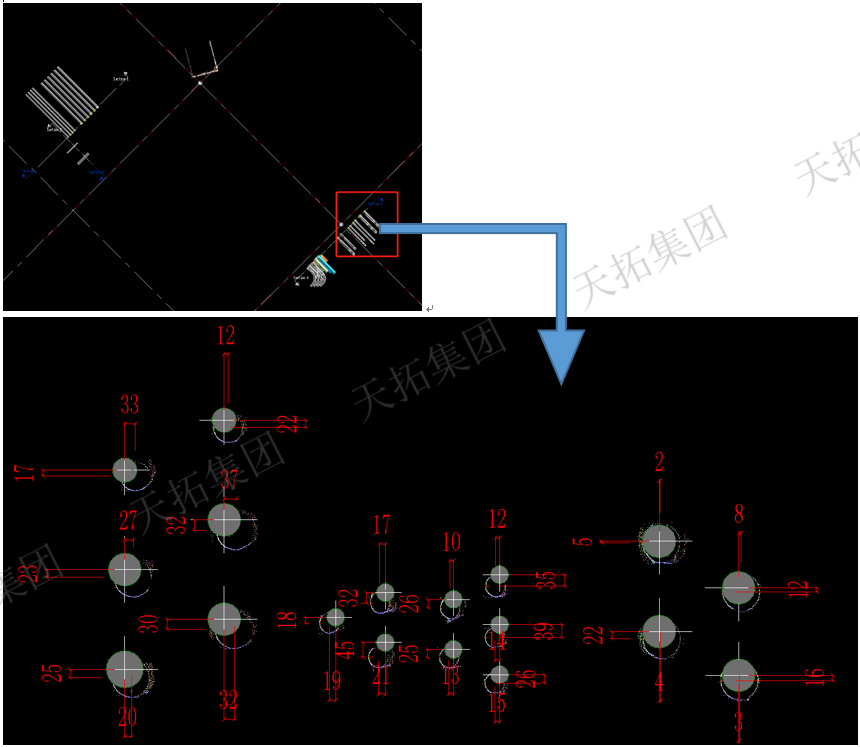
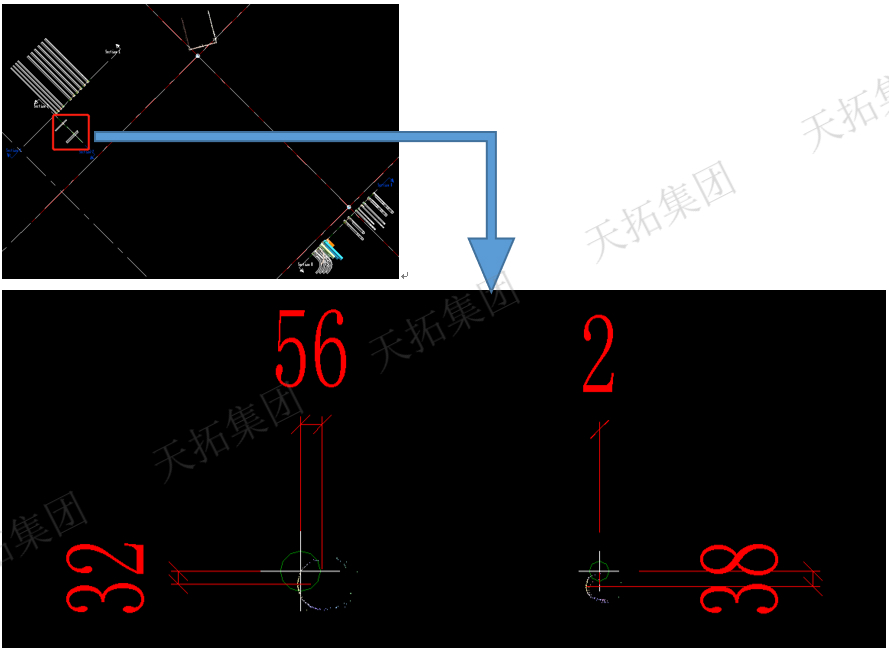
管道点云数据与BIM模型进行尺寸校核
将管道点云数据导入到revit中,通过平面、剖面等视图,可直观的查看偏差。
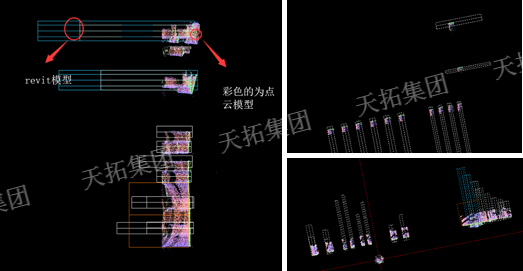
下列图片均为在revit模型中所做的平面、剖切面,直观的查看点云数据与revit模型位置关系,并标注管道中心的偏差。
三、模型调整
误差分析及方案调整:对于现场与模型不符合的地方,与业主、现场安装人员等进行沟通,经过多方讨论和商量,制定可行的方案调整。
问题描述:由于现场施工时套管埋设存在标高偏差,将会导致后续管线安装的空间不足,无法进行管线布设。
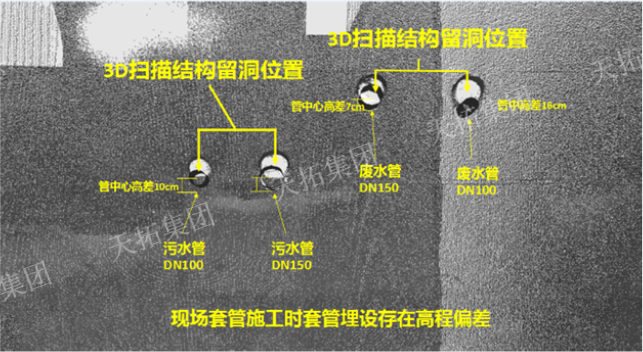
点模存在误差
方案调整:污水管现场实际套管比模型中要高10cm,采用双45°弯头调整管线高差;废水管则利用已有翻弯且上部有抬高空间的条件下,将入管井管线抬高,配合既有套管安装高度,保证原有管线能顺利安装。
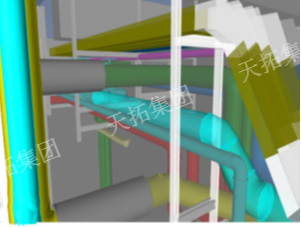
污水管处理方法 废水管处理方法
四、总结
采用三维激光扫描的全景测量方式,解决了传统单点测量方式的低效率和测量数据的不全面性,采用非接触测量形式,更高效快速记录结构垂直度、平整度、高度等信息,对测量的对象进行实景复制。利用测量点云信息构建出真实的三维点云模型,与BIM模型进行比对分析,帮助现场偏差地方进行方案调整,完成质量控制、减少返工、提前解决问题,有效提升工程项目的管理水平及施工质量。
#三维激光扫描#点云#BIM放样机器人#BIM放线#BIM咨询#深化预埋管件#机电管线综合





