
某教育基地幕墙精准安装案例
项目介绍:该项目采用“科技之翼”作为科技馆设计方案,科技馆两侧对称分布着两个空间双曲面连廊。建筑空间造型,由上下两层共计24根弧形管梁构成,每根管梁直径为1.4米,壁厚3厘米,跨度达到28米,24根弧形管梁作为骨架支撑,在骨架上架设球网架,球网架由管道和球体焊接而成,与“管桁架”无缝对接后,可形成巨大的网面,每个焊接点需要进行精准定位。该建筑拥有国内最复杂的建筑表皮,施工难度国内能排到前五名。

展馆效果图
项目难题:(1)24根弧形管梁在施工安装中发生变形,安装不精准,现场安装的骨架结构与设计模型出入较大,不能后续的球形网架安装提供可靠的安装依据。(2)球形网架的定位安装焊接。(3)球形网架的吊装定位。
解决方案:该项目引进天宝三维激光扫描技术和BIM放样机器人技术,解决弧形梁精度施工,幕墙施工 和钢结构 施工吊装安装等施工难题。为以后的复杂的异性幕墙精准施工安装提供了全新的施工方法和思路。
施工方案流程如下:
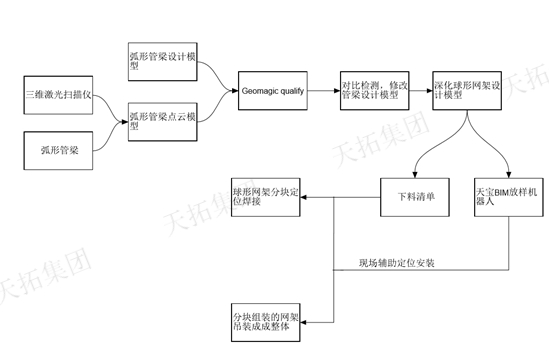
具体实施步骤如下:
Step1 纠正弧形管梁安装完成后与设计模型产生的偏差,修改管梁的设计模型,为球形网架的模型深化提供依据。
1、现场采集三维数据



现场架设三维激光扫描仪获取管梁的点云模型
2、内页处理点云数据(降噪,分割,导出所需点云格式)
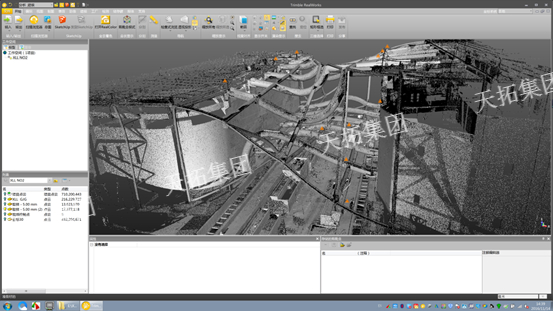
在realworks点云软件中处理点云数据
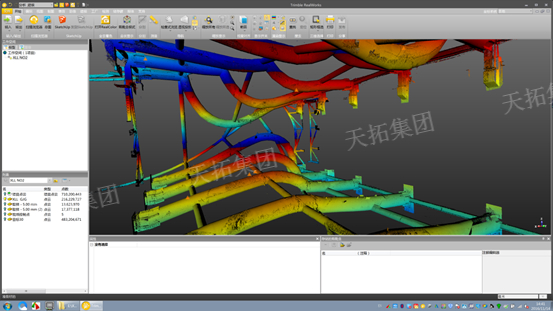
在realworks软件中,分割出管梁的点云数据
3、管梁点云模型和设计模型导入到Geomagic qualify 软件做对比检测,根据偏差调整管梁的设计模型。
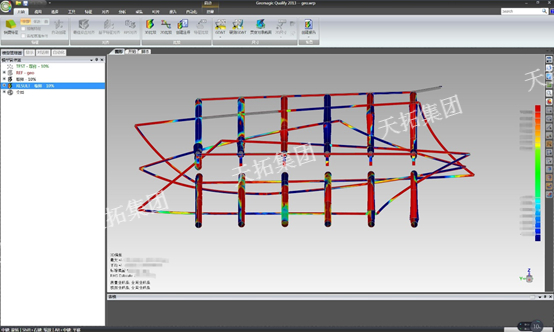
在geomagic qualify软件中对比检测生成色谱图

尺寸偏差分析
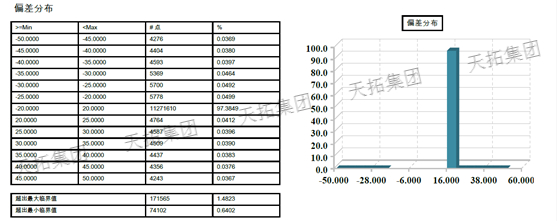
偏差报告(PDF报告内容较多,此处节选部分)
4、根据偏差报告,修改管梁的设计模型。
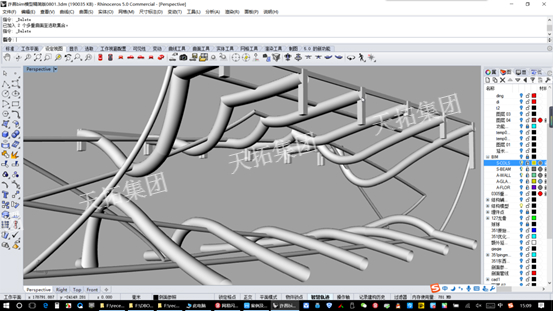
修改后的Rhino模型
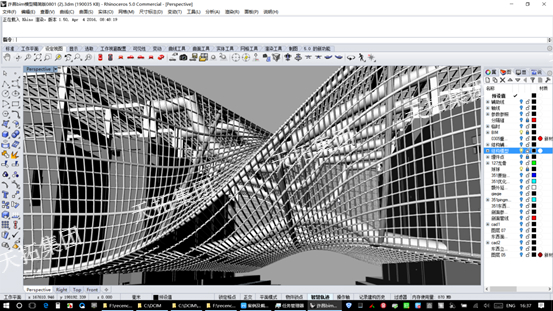
5、深化球形网架模型。
Step2 球形网架分区,BIM放样机器人辅助球形节点定位。
由于整个球形网架巨大,现场采用将网架分割为若干小块,每个小块球形网架由球形节点和钢管焊接而成在地面组装,由于网架是曲面的,每个球形高度和水平位置都不同,球形节点的位置采用天宝的BIM放样技术,定位每个单元网架球形节点位置。
1、在单元球形网架模型里面,提取每一个需要放样定位的球形节点,将球形网架模型和放样坐标的文件导入到BIM放样机器人平板电脑中。现场通过平板电脑控制BIM放样机器人,通过棱镜,智能放样,快速精准的定位每个球形节点的空间位置,然后通过焊接钢管连接,每个球形节点,制作出每个单元球形网架。



现场通过平板的电脑的方位指示,调节支架的高度找到球形节点的空间位置IM
#三维激光扫描#点云#BIM放样机器人#BIM放线#BIM咨询#精准定位#异形曲面幕墙





